



以欧姆龙NJ控制为核心的点胶机控制系统
摘要: 本文介绍了以欧姆龙NJ控制为核心的点胶机控制系统,通过实际测试,满足了客户关于系统快速性和稳定性等方面的要求,使得设备的性能得到进一步提升。
1引言
点胶机是PCB板上需要贴片的位置预先点上一种特殊的胶来固定贴片元件的自动化机器,主要用于产品工艺中的胶水、油漆以及其他液体精确点、注、涂、点滴到每个产品精确位置,可以用来实现打点、画线、圆型或弧型。
随着手机、液晶电视的发展,液晶需求量迅猛提高,点胶机等相关制造设备的性能需要进一步提升,来满足市场的需求。
2设备工艺
液晶加工工艺复杂,需要多道工序,本设备是对玻璃基板进行涂覆加工。 在本设备中,控制5跟伺服轴,其中X和Y轴进行插补,其余轴进行单动动作,设备图片如图1所示。
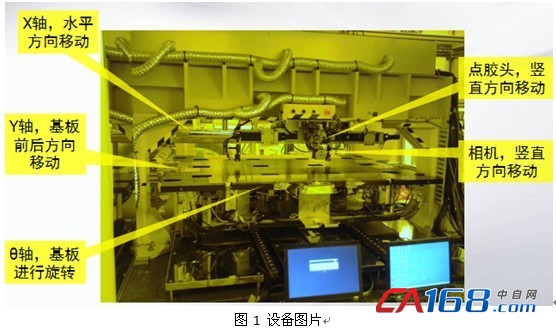
当设备开始工作时,各轴从全原点进入到指定的初始位置,当工件进入后进行视觉对位,根据视觉检测,旋转θ轴来调整工件位置,同时,X轴和Y轴进行插补,执行点胶曲线绘制轨迹,涂胶完毕后,工件送出。
在本项目中,设备的控制轴数为5根,需要圆弧插补和直线插补功能,要求系统速度快且稳定,并且希望使用网络型伺服,以使接线简单,便于维护。根据客户的这些要求,欧姆龙提出了一个基于NJ控制器的解决方案。
3系统硬件解决方案
根据设备要求,本系统选用欧姆龙NS系列触摸屏、NJ系列控制器和G5系列伺服,硬件系统结构图如图2所示。NS 系列触摸屏是OMRON的多功能、高性能的触摸屏,具有兼容性强、简单绘图等特点。NJ系列SYSMAC机器控制器是欧姆龙最新推出的运动、逻辑、视觉控制三合一的新一代PLC,可实现4至64轴的运动控制, 内置EtherNet/IP与EtherCAT主站,最多可支持192节点的EtherCAT从站(含轴),可实现直线、圆弧等的插补动作功能。G5系列伺服电机/驱动器内置超高速EtherCAT通信,可通过全闭环控制实现高精度定位,低刚性的机械也能抑制加减速时的晃动,正好满足客户对网络通信以及稳定性的要求。系统主要配置列表见表1。

[#page#]

本方案优点众多,采用NJ系列控制器,可实现运动控制功能块+ST编程,逻辑和数据处理方式灵活,运动控制调用功能块,数据在一个CPU中处理,实时性强,编程简单。在网络方面,NJ的运算周期和EtherCAT的通信周期完全同步,实现从站间同步1μs 分布式时钟功能,根据分支单元,可以采用总线型拓扑和星型拓扑,组网方便,维护简单。
4控制系统难点分析与解决
4.1坐标数据处理
在触摸屏上设置图形参数,将曲线分为直线插补和圆弧插补,根据设置的参数计算每一段的坐标数据。由于产品型号多,每个产品的数据量比较大,所以使用NJ的两个功能来简化编程工作:
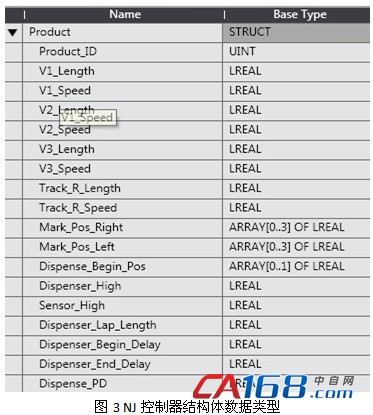
(1)使用NJ中支持的数据类型:结构体(见图3)
结构体的定义
含义:不同类型数据的集合。
功能:用于描述一个“概念”。
将整个产品的数据定义成结构体,存储每一段曲线的数据,其中坐标数据使用数组。 这样的数据结构适用于不同型号的产品。
[#page#]
(2)使用ST语言处理数据(见图4)
做数据运算时,使用ST语言比使用梯形图效率提高8倍,并且可读性更高。

4.2直线轨迹和圆弧轨迹交接处平滑过渡
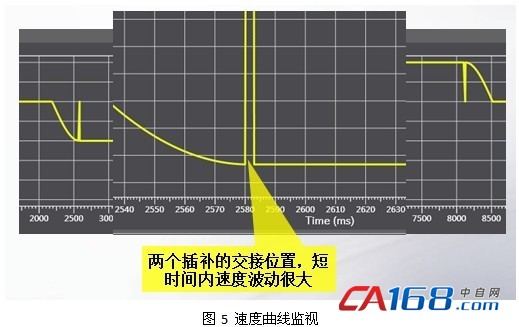
由于在整个运动中不断的进行运动指令的改变,所以运行中速度的变化比较大。在SysmacStudio中监视速度曲线,见图5,从途中可以看出,两个插补的交接位置,短时间内速度波动很大。
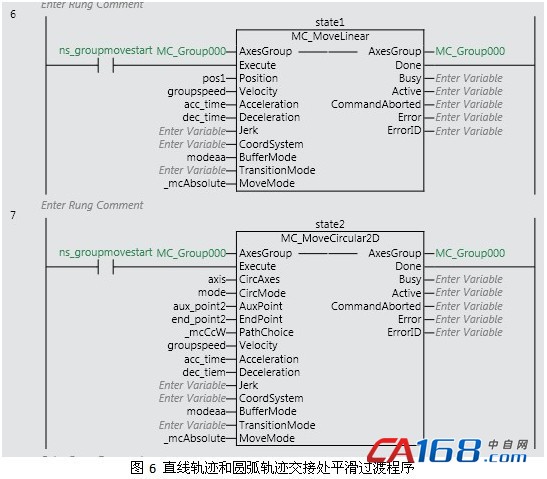
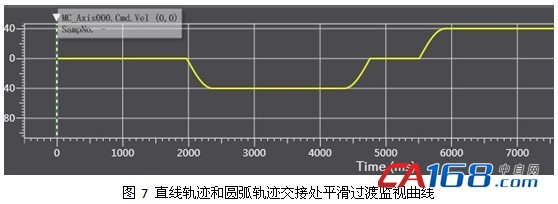
解决这一问题,可以在程序中使用“BufferMode”,选择 “_mcBlendingHigh”方式,程序如图6所示。采用这一方式之后,可以从SysmacStudio中监视轴的速度曲线(见图7)看出,曲线过渡平滑。
5结束语
在本项目中,很好地解决了坐标数据处理以及直线轨迹和圆弧轨迹交接处平滑过渡的问题,并通过实际的测试,满足了客户对于系统快速性和稳定性等方面的要求。





暂无评论